高精度地图是现有传感器的增强和弥补,首要体现在以下三方面:地图视觉、消解其他传感器差错、更丰厚的细节,更全面的感知。
传感器系统,无论是激光雷达还是视觉,由于遮挡和间隔的原因,它是会受到限制的。但地图不会受到限制,一起,它能够消除部分传感和差错,有些传感器无法辨认实在和虚拟之间的差异,有些比方斜度过大的时分,需求地图来进行弥补。还有一些更丰厚的细节和感知,如下雪天,任何传感器都会失效,地图仍然能发挥作用。
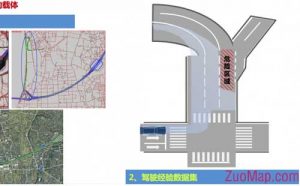
一起,高精地图还能够充当驾驭经历的载体。我们能够搜集许多驾驭员信息,经过多维时空数据的发掘,剖析风险区域,作为一个新的常识、驾驭经历数据集供给给新的驾驭者。
高精地图还能供给认知和决议计划参阅:
1、地图供给操控决议计划依据;
2、地图结合传感器进行认知。高精地图“反哺”,辅佐车身定位。例如,辨认交通标志牌后将其作为地图上的定位参阅点。
在业界我们听到一些声响,高精地图究竟是什么?许多人宣称“我做的是高精地图”。比方图商会从轿车的视点去了解高精地图,就是以数据可测量的方式。对一些创业公司而言,如果它找到的视觉或激光点云特征点,也能够认为是高精地图。那么,究竟什么是高精地图?
高精度地图供给更完善的周边环境和更精确的定位,为自动驾驭供给决议计划支撑,确保行车安全——这是它的中心功用。无论是什么样形状的高精地图,它要满意这样的中心功用。
内在则是包含动态改变的时空方位场表达。如果把许多方位信息认为是一个三维空间,在高精地图里,我们还需求添加两个维度:一是时刻维度,一切方位都是动态改变的;二是可变维度,任何数据的精度和粒度是可变的。
如此,我们能够看到将内在时空场表达断定之后,这个内在实践上能够发生许多外延。Road DNA也好,或特征地图也好,它仅仅这种内在的一个外延,一种表现形式而已。在这里,高精度的意义,指的就是地图的坐标精度更高,路途交通信息元素丰厚精密,为定位和途径规划供给精密依据。
现在的高精地图,有了内在之后,还需求寻觅一个运用场景。曾经的地图是给人运用的,现在的地图是给车自动驾驭轿车运用的,所以它要更贴近于人类认知和机器智能,它是一个更详细、更新和可变标准的表达。
上图不同的分层:实在世界、传统导航地图模型、高精地图模型,就是一个可变的标准。这就是在高精地图时空表达中——可变标准的维度。高精地图的数据表达模型,必需要添加一个时刻维度。怎么了解时刻维度?我们把它分为静态数据模型和动态数据模型。
高精地图为自动驾驭效劳,它需求将路途根本形状,经过地图或矢量数据来正确表达出来。在静态高精地图标注模型中,车道要素模型包含车道中心线、车道边界线、参阅点、虚拟连接线等。车道中轴线采自于实践车道的中轴线方位,该目标用于车辆定位和引导车辆行驶;